Нужно научиться подавать им только один сигнал – сигнал тревоги, который птицы издают при приближении хищника.
Вот как эту задачу решили учёные из Молдавии. Они поймали скворца, посадили его в клетку и начали изучать те самые тревожные сигналы, которые издавала птица, когда к ней подносили близко кошку. Это и были сигналы тревоги по – скворечьи. Их записали на магнитофон и через усилитель и громкоговоритель стали передавать в садах и огородах. Заслышав такой сигнал, испуганные птицы тут же улетали и долго потом не возвращались. Так был найден надёжный способ защиты созревающего урожая от скворцов. Свою аппаратуру учёные назвали кибернетическим чучелом.
Для изготовления такого чучела понадобится магнитофон, усилитель мощностью 10 Вт и три – четыре одноваттных громкоговорителя, укреплённых на шестах на высоте 3…5 м.
Моделирование речи автоматов
Как мы уже видели из рис. 23, спектр речи автомата – сирены значительно проще речи человека. Чтобы получить сигнал сирены, нужно сформировать звуковой сигнал, частота которого периодически изменялась бы по пилообразному закону.
Функциональная схема электронной сирены приведена на рис. 27. Прямоугольные импульсы с выхода задающего мультивибратора через диод VD1, пропускающий только отрицательные полуволны импульсов, поступают на зарядно – разрядную цепь, состоящую из зарядного резистора R 3 ap, конденсатора С1 и резистора цепи разрядки К ра зр – Зарядно – разрядная цепь превращает прямоугольный импульс мультивибратора в пилообразный импульс, фронт и спад которого и будут определять характер звучания тревожных сигналов сирены. Второй мультивибратор задаёт среднюю частоту тона сирены.
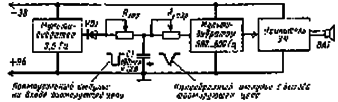
Регулируя резисторы R 3a p (сопротивлением 5…20 кОм) и R pa3 p = (390… 100 кОм), добиваются нужного качества звучания сирены.
Электронный музыкальный автомат. Сравнительно простой электронный музыкальный автомат может быть собран по схеме рис. 28 («Радио», 1982, 12).
Подбирают ту или иную мелодию подстроечными резисторами цифро-аналогового преобразователя (ЦАП) (всего автомат выдаёт восемь звуков различной тональности). Частоту тактового генератора изменяют (если это необходимо) подборкой резистора R1.
Такой автомат удобно использовать в качестве квартирного звонка. Для этого его следует дополнить реле выдержки времени, усилителем мощности и сетевым блоком питания (рис. 29).
Если кратковременно нажать на кнопку SB1, сработает реле К1 и контактами К 1.1 самоблокируется. Автомат начнёт воспроизводить мелодию. По окончании мелодии счётчик возвратится в исходное состояние и на прямом выходе триггеров DD2.1, DD2.2, DD3.1,
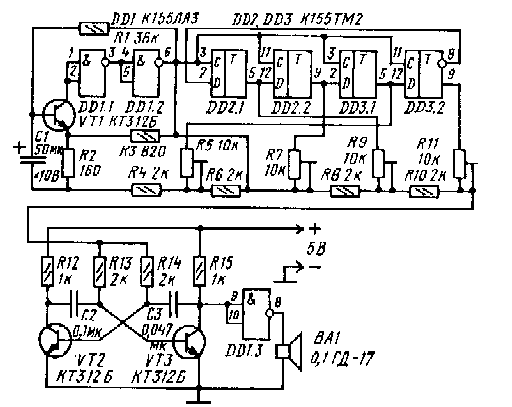
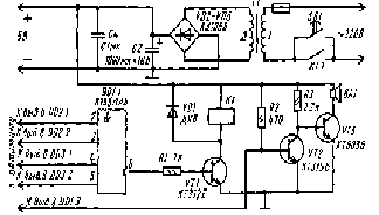
DD3.2 29 появится напряжение высокого уровня. Соответственно на выходе элемента DD1.1 (рис. 30) будет напряжение низкого уровня и реле К1 отпустит якорь. Автомат выключится.
Усилитель мощности собран на двух транзисторах (VT2 и VT3) и нагружен динамической головкой ВА1.
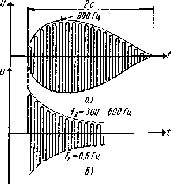
Моделирование речи животных. Как вы убедитесь, схемы звуковых автоматов весьма просты. В них получение нужных сигналов сводится к включению и выключению (манипуляции) задающим генератором тона. Правда, в сирене использована не манипуляция, а модуляция, но по довольно простому закону – пилообразному. Эти автоматы очень просты в налаживании и часто работают сразу же после сборки. Значительно сложнее моделировать даже самую элементарную речь животных. Здесь законы модуляции гораздо многообразнее. Например, диаграмма кошачьего мяуканья (рис. 31, а) выглядит как плавное нарастание сигнала до максимума с последующим плавным спадом, а лай собаки – как наложение колебаний двух генераторов низкой частоты f t и более высокой Г 2 (рис. 31,6).
Моделирование речи человека. Из всех живых существ, населяющих мир, только человек оказался способным развить голосовой аппарат для кодирования и передачи сложнейшей информации. Учёные проводят сложнейшие исследования по автоматической расшифровке и имитации звуков речи, но пока ещё речевые сигналы содержат много загадок и не поддаются распознаванию даже с помощью тончайших анализаторов, использующих самые мощные современные электронные вычислительные машины.
Известны попытки имитации голоса человека с помощью электронных устройств. Так, роботостроитель Бруинсма, автор книги «Практические схемы роботов» (М.: Госэнер – гоиздат, 1962), создал для автомата «Игра в крестики и нолики» электронный прибор, имитирующий восторженный возглас человека при выигрыше автомата и «унылое ворчание» при проигрыше. В приборе более 10 мультивибраторов и других устройств. Однако его работа оставляет желать лучшего. Словом, моделирование речи – очень трудная задача.
Однако мы уже отмечали, что с помощью мультивибраторов можно получать звуки, близкие к звучанию некоторых гласных букв (А, О, И). Исследования показывают, что звучания этих гласных складываются из двух частот, т.е. для моделирования нужна параллельная работа по меньшей мере двух мультивибраторов.
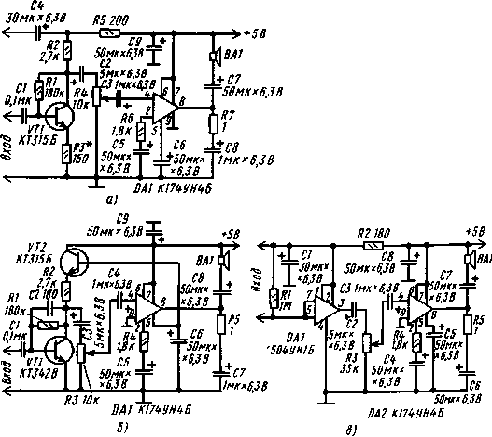
Маломощные усилители речи роботов на микросхемах. В случаях, когда не требуется большая громкость звучания того или иного устройства речи робота и достаточно выходной мощности усилителя около 0,1 Вт, можно использовать усилители звуковой частоты, разработанные для миниатюрных приёмников («Радио», 1985, № 10). Такие усилители могут пригодиться в автоматических речевых устройствах.
Принципиальная схема первого варианта усилителя показана на рис. 32, а. Для повышения входного сопротивления усилителя в цепь эмиттера транзистора VT1 включён резистор R3 (его сопротивление может быть 110…240 Ом). Рекомендуемое сопротивление головки ВА1 громкоговорителя 6…8 Ом.
Второй вариант усилителя (рис. 32,6) отличается повышенной экономичностью. В первой ступени необходим транзистор с большим коэффициентом передачи тока, способный работать в режиме малых токов. Кроме указанного на схеме можно использовать транзисторы КТ342А, КТ342Б и КТ3102А – КТ3102Е. Входное сопротивление усилителя 10 кОм; ток, потребляемый первой ступенью, 0,3…0,5 мА. Конденсатор С2 предотвращает самовозбуждение усилителя на высокой частоте. Транзистор VT2 выполняет функции развязывающего фильтра в цепи питания транзистора VT1. Это позволило обойтись без дополнительного оксидного конденсатора и резистора.
В третьем варианте усилителя (рис. 32, в) функции входного транзистора выполняет микросхема DA1 на полевых транзисторах. Достоинство такой замены – высокое входное сопротивление (оно определяется сопротивлением резистора R1 и в зависимости от требований может быть в пределах от нескольких десятков килоом до 1 МОм).