Для открытого пламени, как показывает практика, наиболее характерна пульсация его инфракрасного и ультрафиолетового излучения – интенсивность различных видов излучения пламени не остаётся постоянной, а изменяется во времени. Явление пульсации, обусювленное физическими процессами, происходящими при горении, можно наблюдать, в частности, на примере обычной газовой юрелки.
Как показали опыты, пульсация характеристик пламени многих горючих материалов, в том числе при искусственном распылении топлива (например, в топках котлов и других теплоустановок), происходит с частотой, лежащей в пределах 15…30 Гц.
7. Осязание роботов
Создание по – настоящему разумного робота невозможно без датчиков, подобных органам чувств человека. О состоянии собственного тела мы можем судить и с закрытыми глазами – от нервных центров в мозт передаётся вся нужная информация. Системой «очувствления» должны обладать и самоуправляемые роботы. Англизируя информацию о состоянии внешней среды и своём собственном, ЭВМ принимает решение о составе и последовательности действий.
Первым чувством, которому «научили» роботов, было осязание. Датчики давления, температуры, влажности, встроенные в пальцы руки, позволяют роботу определять, есть ли рядом нужный предмет, каковы его размеры, форма, температура поверхности. Осязательными (тактильными) датчиками оснащены роботы третьего поколения. Движущиеся, ходячие роботы оповещаются о приближении к препятствию специальными антеннами.
Роботы, которые предназначены для сборки, должны уметь распознавать отдельные детали. В последнее время появилась возможность создания искусственных органов осязания, заменяющих пальцы рук человека. В качестве искусственных, ощупывающих окружающие предметы органов осязания используются ёмкостные, индукционные, температурные, радиоактивные и ультразвуковые щупы – датчики, которые способны превращать воздействия, получаемые ими от ощупываемого предмета, в определённые электрические сигналы.
Среди наиболее простых и наиболее распространённых датчиков внешней информации можно отметить так называемые контактные датчики. На концах схвата – руки робота устанавливают специальные выключатели, которые фиксируют факт прикосновения к детали или станку и посылают импульс в мозг робота. Десяток таких выключателей, расположенных не только внутри пальцев схвата, но и на наружной его поверхности (сверху, снизу, справа и слева), помогают роботу «на ощупь» определить положение детали или возникшего препятствия.
Однако человек, манипулируя предметом, фиксирует не только факт соприкосновения, но и ощущает давление руки на предмет через кожу и таким образом может регулировать усилие сжатия соответственно массе и прочности предмета. Такой датчик представляет собой, например, слой электропроводящего вспененного полиуретана, заключённого между тонкими металлическими пластинками. В зависимости от давления расстояние между пластинами меняется. Соответственно изменяется электрическое сопротивление цепи. Эти свойства искусственной чувствительной кожи уже используют при протезировании.
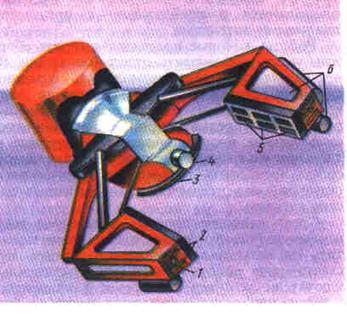
В качестве весьма грубого примера конструкции схвата манипулятора, ощущающего предметы, рассмотрим устройство манипулятора Эрнста (рис. 56), собранного им в конце 1961 года. Манипулятор оснащён двумя группами датчиков. Одну образуют датчики, установленные во всех подвижных сочленениях. Они посылают информацию о том, как механизм выполняет сигналы, управляющие движением всех сочленений руки. Это датчики внутренней обратной связи. Система непрерывно сравнивает те положения руки, которые задаёт управляющая машина, с положениями, которые рука занимает в действительности, и в соответствии с результатами этого сравнения ЭЦВМ непрерывно генерирует сигналы управления, устраняющие рассогласование, заставляя механическую руку занимать нужные положения и нужным образом менять их.
Вторая группа датчиков установлена на схвате. Именно эти датчики связывают руку с внешним миром. Схват, как обычно состоит из двух пальцев. Верхняя, нижняя и передняя плоскости каждого пальца оснащены контактными датчиками, работающими в двоичном коде: включён – выключен. Эти датчики сигнализируют о том, что рука наткнулась на объект нерабочим участком. На внутренней и рабочей передней плоскостях каждого пальца расположено ещё по восемь датчиков. Они работают уже не в двоичном коде, а генерируют сигналы, уровень которых пропорционален силе нажатия на датчик. Шесть из них расположены на рабочих плоскостях схвата и информируют о том, какие части плоскостей участвуют в схвате и с какой силой пальцы сжимают объект.
Два датчика, расположенные на передних плоскостях пальцев, регистрируют силу сопротивления движению схвата со стороны объекта. В случае, если рука с ним сталкивается в процессе движения, эти датчики позволяют получить информацию о протяжённости и размерах этого объекта.
Таким образом, схват – его рабочие и нерабочие поверхности – снабжён подобием осязания и очувствлен по силе сжатия. Кроме того, на передних поверхностях пальцев между датчиками осязания помещено по глазу – фотодиоду, реагирующему на затенение: когда рука приближается к какому – либо объекту, но ещё не коснулась его, в машину поступает сигнал о приближении и о необходимости снизить скорость перемещения. ЭЦВМ принимает, обрабатывает и использует принятую информацию при реализации заданной программы.
Манипулятор Эрнста работает как робот с «завязанными глазами». Датчики, которыми он оснащён, собирают информацию вслепую – осязанием, «на ощупь». Он не может отделить процесс сбора информации от процесса движения, сначала получить представление о ситуации, сложившейся во внешнем мире, и только затем начать действовать. Именно поэтому он вынужден искать их один за другим. А настоящий робот должен иметь такие органы чувств, которые дали бы ему возможность предпослать движению сбор информации.
Конструирование сенсорных устройств
Как мы уже говорили, неотъемлемой частью систем осязания роботов являются сенсорные устройства, вызывающие срабатывание механизмов ориентации и захвата предметов. Контактное управление все чаще находит сейчас применение в разных областях. В обыденной жизни можно встретиться с этим способом управления в лифте. В современных лифтах вместо обычных кнопок устанавливаются на панели сенсорные контакты – неподвижные металлические пластины, при прикосновении к которым приходит в действие механизм лифта.
Что это за система управления, как она работает и каковы её преимущества? Сенсорное управление имеет одно преимущество – в нём нет электрических контактов – одного из самых ненадёжных звеньев электронной аппаратуры. Именно благодаря этому бесконтактное управление нашло широкое распространение. В частности, сенсорными переключателями каналов оснащены многие современные телевизоры.
Как работает система сенсорного управления? Различают два способа воздействия: ёмкостное и резистивное.
Тело человека имеет определённую довольно большую ёмкость (рис. 57) относительно окружающих проводящих предметов. Поэтому, когда человек прикасается к металлической пластине – сенсорному контакту (или короче – сенсору), резко изменяется ёмкость, приведённая к входу аппарата. На этом основана работа ёмкостного сенсора.
В резистивном сенсоре использовано сопротивление покрова пальца (рис. 58). В этом случае сенсор состоит из двух изолированных металлических пластин, которые замыкают пальцем при прикосновении.